


सिंगल अॅक्सिस पोझिशनर/ऑटोमॅटिक वेल्डिंग पोझिशनर
तांत्रिक बाबी
| एकल-अक्ष क्षैतिज सर्वो पोझिशनर | सिंगल-अक्ष मुख्य ट्रंक प्रकार सर्वो पोझिशनर | स्पिंडल बॉक्स प्रकार सिंगल-अक्ष सर्वो पोझिशनर | |||||||||
| अनुक्रमांक | प्रकल्प | पॅरामीटर | पॅरामीटर | टिप्पण्या | पॅरामीटर | पॅरामीटर | पॅरामीटर | टिप्पण्या | पॅरामीटर | पॅरामीटर | टिप्पण्या |
| 1. | रेटेड लोड | २०० किलो | ५०० किलो | मुख्य अक्षाच्या R300mm/ R400mm त्रिज्येच्या आत | ५०० किलो | ८०० किलो | १२०० किलो | मुख्य अक्षाच्या R400mm/R500mm/R750mm त्रिज्येच्या आत | २०० किलो | ५०० किलो | ते स्पिंडल अक्षाच्या R300 मिमी त्रिज्येच्या आत आहे. अंतर्गत, गुरुत्वाकर्षण केंद्रापासून फ्लॅंजपर्यंतचे अंतर ≤३०० मिमी |
| 2. | मानक गती त्रिज्या | आर३०० मिमी | आर४०० मिमी | आर६०० मिमी | आर७०० मिमी | आर९०० मिमी | आर६०० मिमी | आर६०० मिमी | |||
| 3. | जास्तीत जास्त फिरण्याचा कोन | ±३६०° | ±३६०° | ±३६०° | ±३६०° | ±३६०° | ±३६०° | ±३६०° | |||
| 4. | रेटेड फिरण्याची गती | ७०°/से | ७०°/से | ७०°/से | ७०°/से | ५०°/से | ७०°/से | ७०°/से | |||
| 5 | स्थिती अचूकता पुन्हा करा | ±०.०८ मिमी | ±०.१० मिमी | ±०.१० मिमी | ±०.१२ मिमी | ±०.१५ मिमी | ±०.०८ मिमी | ±०.१० मिमी | |||
| 6 | क्षैतिज रोटरी डिस्कचा आकार | Φ६०० | Φ८०० | - | - | - | - | - | |||
| 7 | विस्थापन चौकटीचे सीमा परिमाण (लांबी × रुंदी × उंची) | - | - | २२०० मिमी × ८०० मिमी ×९० मिमी | ३२०० मिमी × १००० मिमी × ११० मिमी | ४२०० मिमी × १२०० मिमी × ११० मिमी | - | - | |||
| 8 | पोझिशन शिफ्टरचे एकूण परिमाण (लांबी × रुंदी × उंची) | ७७० मिमी × ६०० मिमी × ८०० मिमी | ९०० मिमी × ७०० मिमी × ८०० मिमी | २९०० मिमी × ६५० मिमी × ११०० मिमी | ४२०० मिमी × ८५० मिमी × १३५० मिमी | ५४०० मिमी × १००० मिमी × १५०० मिमी | १०५० मिमी × ६२० मिमी × १०५० मिमी | १२०० मिमी × ७५० मिमी × १२०० मिमी | |||
| 9 | स्पिंडल रोटरी डिस्क | - | - | Φ३६० मिमी | Φ४०० मिमी | Φ४५० मिमी | Φ३६० मिमी | Φ४०० मिमी | |||
| 10 | पहिल्या अक्षाच्या रोटेशनची मध्य उंची | ८०० मिमी | ८०० मिमी | ८५० मिमी | ९५० मिमी | ११०० मिमी | ८५० मिमी | ९०० मिमी | |||
| 11 | वीज पुरवठ्याच्या अटी | तीन-चरण 200V±10%50HZ | तीन-चरण 200V±10%50HZ | आयसोलेशन ट्रान्सफॉर्मरसह | तीन-चरण 200V±10%50HZ | तीन-चरण 200V±10%50HZ | तीन-चरण 200V±10%50HZ | आयसोलेशन ट्रान्सफॉर्मरसह | तीन-चरण 200V±10%50HZ | तीन-चरण 200V±10%50HZ | आयसोलेशन ट्रान्सफॉर्मरसह |
| 12 | इन्सुलेशन वर्ग | H | H | H | H | H | H | H | |||
| 13 | उपकरणांचे निव्वळ वजन | सुमारे २०० किलो | सुमारे ४०० किलो | सुमारे ५०० किलो | सुमारे १००० किलो | सुमारे १६०० किलो | सुमारे २०० किलो | सुमारे ३०० किलो | |||
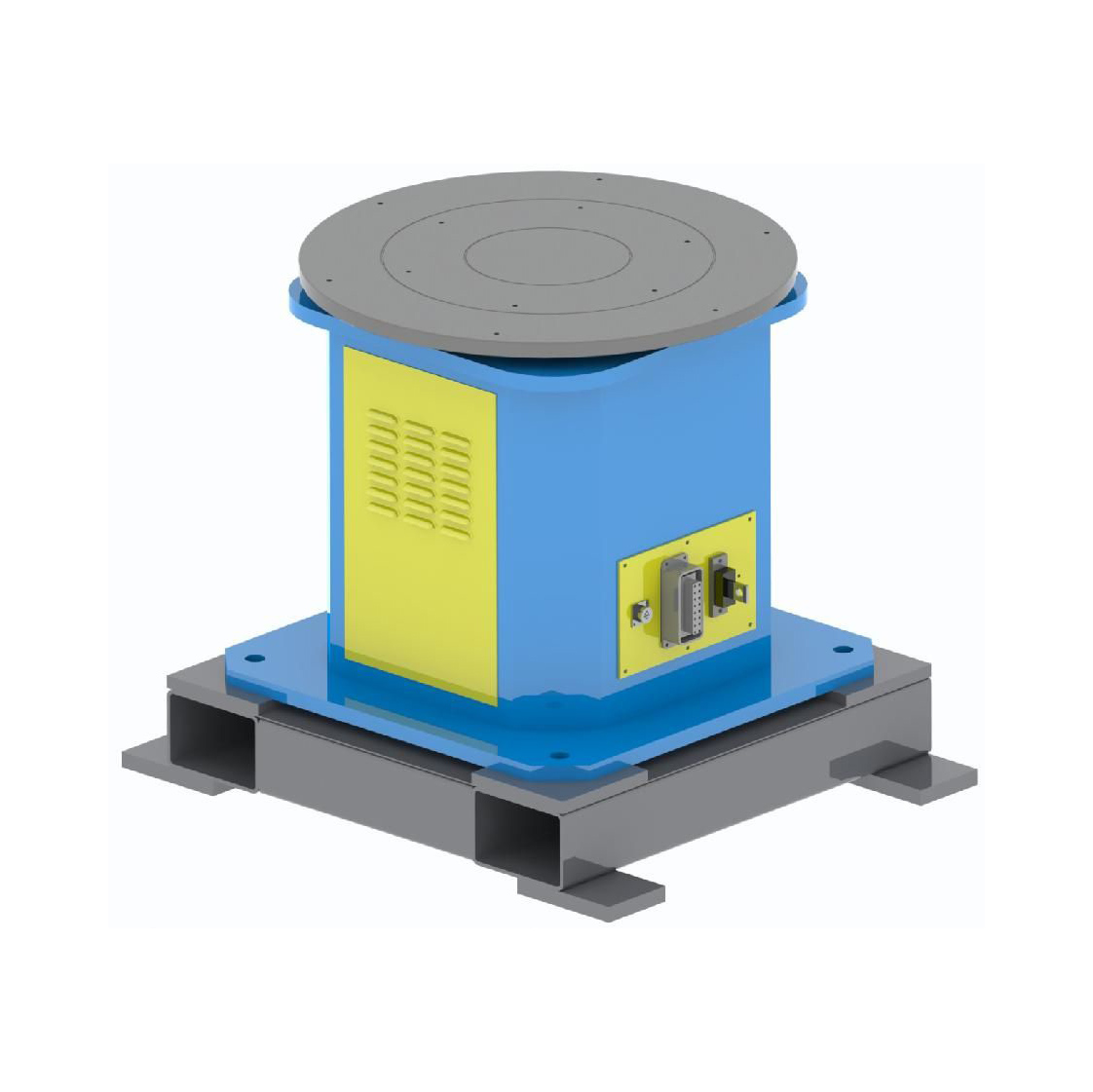
एकल-अक्ष क्षैतिज सर्वो पोझिशनर

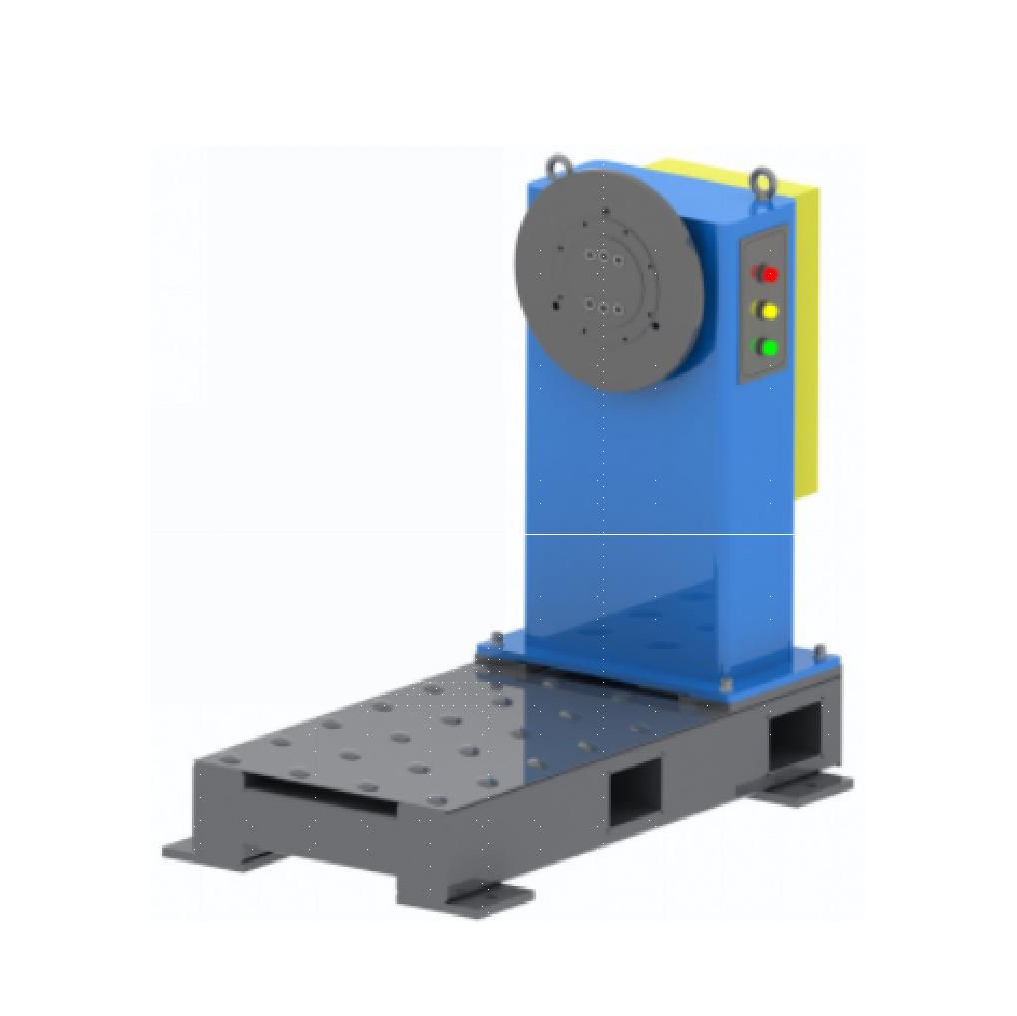
सिंगल-अक्ष मुख्य ट्रंक प्रकार सर्वो पोझिशनर
स्पिंडल बॉक्स प्रकार सिंगल-अक्ष सर्वो पोझिशनर
रचना परिचय
सिंगल-अॅक्सिस हॉरिझॉन्टल सर्वो पोझिशनरमध्ये प्रामुख्याने इंटिग्रल फिक्स्ड बेस, रोटरी स्पिंडल बॉक्स, हॉरिझॉन्टल रोटरी डिस्क, एसी सर्वो मोटर आणि आरव्ही प्रिसिजन रिड्यूसर, कंडक्टिव्ह मेकॅनिझम, प्रोटेक्टिव्ह शील्ड आणि इलेक्ट्रिक कंट्रोल सिस्टम असते. फिक्स्ड बेसला उच्च-गुणवत्तेच्या प्रोफाइलने वेल्डेड केले जाते. अॅनिलिंग आणि ताण कमी केल्यानंतर, उच्च मशीनिंग अचूकता सुनिश्चित करण्यासाठी आणि की पोझिशन्सची अचूकता वापरण्यासाठी व्यावसायिक मशीनिंगद्वारे त्यावर प्रक्रिया केली जाईल. पृष्ठभागावर अँटी-रस्ट अपिअरन्स पेंट फवारला जातो, जो सुंदर आणि उदार आहे आणि ग्राहकांच्या गरजेनुसार रंग सानुकूलित केला जाऊ शकतो.
रोटरी स्पिंडल बॉक्ससाठी निवडलेले उच्च-गुणवत्तेचे प्रोफाइल स्टील वेल्डिंग आणि अॅनिलिंग आणि व्यावसायिक मशीनिंगनंतर त्याची दीर्घकालीन टिकाऊपणा आणि स्थिरता सुनिश्चित करू शकते. क्षैतिज रोटरी डिस्क उच्च-गुणवत्तेच्या प्रोफाइलसह वेल्डेड केली जाते. अॅनिलिंग उपचारानंतर, व्यावसायिक मशीनिंग पृष्ठभागाच्या फिनिशिंगची डिग्री आणि त्याची स्वतःची स्थिरता सुनिश्चित करू शकते. वरच्या पृष्ठभागावर मानक अंतरासह स्क्रू होलसह मशीनिंग केले जाते, जे ग्राहकांना पोझिशनिंग टूलिंग स्थापित करणे आणि दुरुस्त करणे सोयीचे आहे.
पॉवर मेकॅनिझम म्हणून एसी सर्वो मोटर आणि आरव्ही रिड्यूसर निवडल्याने रोटेशनची स्थिरता, पोझिशनिंगची अचूकता, दीर्घ टिकाऊपणा आणि कमी बिघाड दर सुनिश्चित करता येतो. कंडक्टिव्ह मेकॅनिझम पितळापासून बनलेली असते, ज्याचा चांगला कंडक्टिव्ह इफेक्ट असतो. कंडक्टिव्ह बेस इंटिग्रल इन्सुलेशनचा वापर करतो, जो सर्वो मोटर, रोबोट आणि वेल्डिंग पॉवर सोर्सचे प्रभावीपणे संरक्षण करू शकतो.
इलेक्ट्रिक कंट्रोल सिस्टीम पोझिशनर नियंत्रित करण्यासाठी जपानी ओमरॉन पीएलसीचा अवलंब करते, स्थिर कामगिरी आणि कमी बिघाड दरासह. वापराची गुणवत्ता आणि स्थिरता सुनिश्चित करण्यासाठी देश-विदेशातील प्रसिद्ध ब्रँडमधून इलेक्ट्रिकल घटक निवडले जातात.








